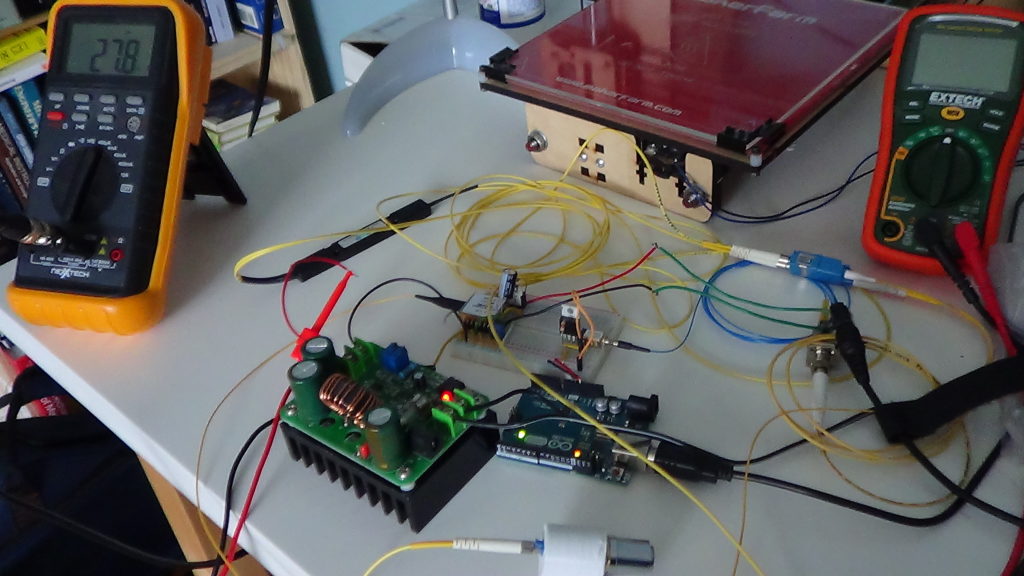
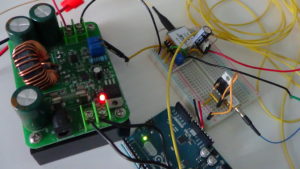
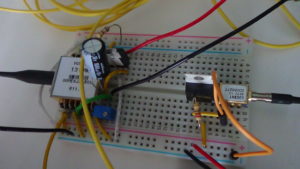
L’ensemble des pièces utilisées pour la conception de mon télescope LCD : en haut à gauche, un raspberry pi avec un shield d’écran LCD, en haut à droite, les 4 lentilles (lentille érectrice, oculaire ainsi que 2 field lenses), à droite, un objectif à focale variable et en bas en noir, toutes les pièces imprimées en 3D pour obtenir un télescope fonctionnel : 4 tubes exactement de la bonne longueur pour correspondre aux distances focales des lentilles, et 4 paires de demi-montures circulaires pour fixer et centrer les lentilles aux bons endroits.
J’y suis allé fort avec mon imprimante 3D cette semaine, passant environ 500g de plastique noir afin de créer toutes les pièces nécessaires à la monture mécanique de l’optique de mon télescope LCD. J’y suis peut-être allé un peu fort avec mon 3mm d’épaisseur, mais je voulais être sûr de la robustesse de l’ensemble.
 La première pièce a été intéressante à faire, puisque j’ai copié l’attache de mon objectif à focale variable, qui tenait avec 4 petites vis déjà présentes, à même des filets déjà faits dans l’objectif. J’ai donc imprimé une pièce de test pour voir si mes dimensions fonctionnaient, avant d’imprimer ma vraie pièce comprenant un tube de 150mm (ce fut sans nul doute l’impression la plus haute que j’ai réalisé à ce jour, mon imprimante se rendant à 180mm maximum en z). Ça a été tout juste pour le diamètre interne du tube, parce que je voulais pouvoir le visser par l’extérieur tout en laissant suffisamment de place à l’intérieur pour les rayons et la lentille de champ.
La première pièce a été intéressante à faire, puisque j’ai copié l’attache de mon objectif à focale variable, qui tenait avec 4 petites vis déjà présentes, à même des filets déjà faits dans l’objectif. J’ai donc imprimé une pièce de test pour voir si mes dimensions fonctionnaient, avant d’imprimer ma vraie pièce comprenant un tube de 150mm (ce fut sans nul doute l’impression la plus haute que j’ai réalisé à ce jour, mon imprimante se rendant à 180mm maximum en z). Ça a été tout juste pour le diamètre interne du tube, parce que je voulais pouvoir le visser par l’extérieur tout en laissant suffisamment de place à l’intérieur pour les rayons et la lentille de champ.
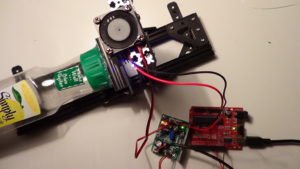
 Parlant de lentille de champ, la voici, positionnée à la première image produite dans mon système. Elle est fixée à l’aide d’un anneau imprimé en deux parties, verticalement, qui permet de maintenir la lentille en place par simple pression, sans avoir besoin de colle, de vis, ou d’ajustement en position. Je suppose qu’elle est placée au centre de l’axe optique, et malgré les tolérances assez élevées que j’ai dû mettre pour tenir en compte des défauts d’impression (surtout dans la partie supérieure de l’arche du cercle), je pense que c’est la méthode la plus précise à ma disposition pour monter une lentille dans un tube.
Parlant de lentille de champ, la voici, positionnée à la première image produite dans mon système. Elle est fixée à l’aide d’un anneau imprimé en deux parties, verticalement, qui permet de maintenir la lentille en place par simple pression, sans avoir besoin de colle, de vis, ou d’ajustement en position. Je suppose qu’elle est placée au centre de l’axe optique, et malgré les tolérances assez élevées que j’ai dû mettre pour tenir en compte des défauts d’impression (surtout dans la partie supérieure de l’arche du cercle), je pense que c’est la méthode la plus précise à ma disposition pour monter une lentille dans un tube.

Je place ensuite un second tube du même diamètre avec une hauteur calculée pour correspondre à ma distance objet de ma seconde lentille (lentille érectrice). Le même principe de monture est utilisé, sauf que cette fois-ci se rajoute un adaptateur de diamètre de tuyau, d’un côté, il y a le petit diamètre, et de l’autre, le plus gros diamètre.

Ensuite, je place un des deux gros tubes de 100mm de haut, afin de placer mon système d’écran LCD. Celui-ci est composé de mon classique écran LCD modifié (voir ma vidéo CrystalCam pour plus d’informations) et d’une seconde lentille de champ plano-convexe du plus gros diamètre que j’ai pu trouver à cette courte focale (D=45mm, f=50mm).

Pour imprimer la monture en 3D, j’ai dû faire une fente juste assez grande pour y insérer l’écran LCD, tout en donnant le plus strict espace pour donner une petite pression sur la lentille pour la maintenir en place. Le côté plat de la lentille aide beaucoup à la positionner directement en contact avec l’écran, sauf que l’autre côté, très bombé, provoque des aberrations importantes qui ne sont pas corrigées par mon système. Je n’ai pas le choix de placer la lentille uniquement de ce côté, puisque je veux pouvoir observer l’écran LCD directement avec mon oculaire de l’autre.
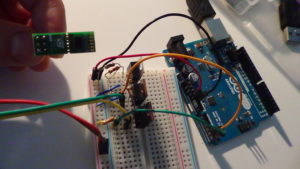
 Pour l’oculaire, j’ai continué avec ma méthode super efficace des moitiés de montures centrées retenant la lentille. On peut en voir les détails sur la photo ci-contre. Deux petites bandes de plastique permettent de retenir la lentille en z, tandis qu’elle est confinée dans un cylindre qui fait un cheveu de plus que sa dimension (un cheveu en tolérance de ma vieille prusa i3, soit 1mm au total sur le diamètre). J’ai rajouté un petit cache-oeil de 6mm avec un diamètre légèrement plus gros afin d’être confortable pour visionner l’écran et de s’assurer que peu de lumière externe entre par l’oculaire dans le système. Puisque l’écran LCD atténue beaucoup la lumière provenant du télescope, c’est important si l’on veut voir quelque chose.
Pour l’oculaire, j’ai continué avec ma méthode super efficace des moitiés de montures centrées retenant la lentille. On peut en voir les détails sur la photo ci-contre. Deux petites bandes de plastique permettent de retenir la lentille en z, tandis qu’elle est confinée dans un cylindre qui fait un cheveu de plus que sa dimension (un cheveu en tolérance de ma vieille prusa i3, soit 1mm au total sur le diamètre). J’ai rajouté un petit cache-oeil de 6mm avec un diamètre légèrement plus gros afin d’être confortable pour visionner l’écran et de s’assurer que peu de lumière externe entre par l’oculaire dans le système. Puisque l’écran LCD atténue beaucoup la lumière provenant du télescope, c’est important si l’on veut voir quelque chose.
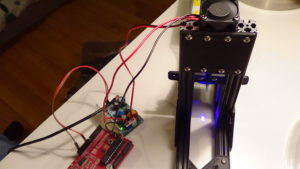
Voici le résultat, une fois monté sur le second tube de 100mm. Bien que la majorité des pièces tenaient simplement par contact, j’ai rajouté de la colle chaude entre toutes les pièces. La pièce critique est l’adaptateur entre les deux diamètre de tuyau, il fallait absolument le coller et en essayant de lui donner un angle nul par rapport à l’axe optique (pas facile). Je n’ai pas pris de chance et j’ai mis de la colle chaude partout, ce qui fait que la monture est extrêmement solide. Afin d’éviter toute intrusion de lumière dans le montage, j’ai rajouté du duct tape noir pour boucher les mini-fentes (surtout celles entre les deux moitiés de monture de lentille). Le tout est un petit peu overkill, mais je me disais que ce ne serait pas un vrai montage d’ingénierie physique sans quelques bâtons de colle chaude et quelques longueurs de duct tape.
Le résultat final est surprenamment beau et aligné, pour des pièces imprimées en 3D. Le télescope est à peine plus long qu’une longue vue standard, à cause de l’ajout de l’étage du LCD et de l’érecteur pour avoir une image à l’endroit. Il fait environ 400cm, ce qui reste très maniable avec les bras. L’ajustement du focus se fait avec la rotation de l’embout de l’objectif, qui déplace l’une des deux lentilles à l’intérieur, modifiant la longueur focale du premier système d’imagerie.
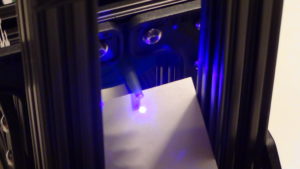
 La présence des lentilles de champ dans le système fait toute la différence pour un télescope aussi long et ayant autant de transformations optiques. On peut voir un aperçu du résultat ci-contre, bien que cette photo ait été prise rapidement avec ma caméra sans retirer l’oculaire. À l’oeil, c’est franchement plus impressionnant. L’image arrive directement sur l’écran LCD, à l’endroit et bien nette (lorsque l’on ajuste le focus). Elle occupe approximativement 23 degrés du champ de vue, ce qui est très satisfaisant sans être exceptionnel, mais d’autres contraintes ont eu préséance dans la conception du système. La principale aberration est la courbure de champ, elle est vraiment très forte dans les coins de l’image. Les autres aberrations sont sans doute masquées par la présence de l’écran LCD qui induit lui-même quelques modifications à l’image, entre autres une atténuation forte ainsi que l’ajout du micro-grillage des pixels. Une étude plus formelle des aberrations produites par les lentilles serait nécessaire pour identifier des solutions. Mais comme d’habitude, tout est affaire de compromis, puisque sans lentille de champ pour imager l’ensemble des rayons sur les autres lentilles, on ne verrait tout simplement rien à cause de l’atténuation trop importante du système.
La présence des lentilles de champ dans le système fait toute la différence pour un télescope aussi long et ayant autant de transformations optiques. On peut voir un aperçu du résultat ci-contre, bien que cette photo ait été prise rapidement avec ma caméra sans retirer l’oculaire. À l’oeil, c’est franchement plus impressionnant. L’image arrive directement sur l’écran LCD, à l’endroit et bien nette (lorsque l’on ajuste le focus). Elle occupe approximativement 23 degrés du champ de vue, ce qui est très satisfaisant sans être exceptionnel, mais d’autres contraintes ont eu préséance dans la conception du système. La principale aberration est la courbure de champ, elle est vraiment très forte dans les coins de l’image. Les autres aberrations sont sans doute masquées par la présence de l’écran LCD qui induit lui-même quelques modifications à l’image, entre autres une atténuation forte ainsi que l’ajout du micro-grillage des pixels. Une étude plus formelle des aberrations produites par les lentilles serait nécessaire pour identifier des solutions. Mais comme d’habitude, tout est affaire de compromis, puisque sans lentille de champ pour imager l’ensemble des rayons sur les autres lentilles, on ne verrait tout simplement rien à cause de l’atténuation trop importante du système.
On se laisse sur cette merveilleuse photo de moi-même en train d’utiliser de manière ludique ce télescope :












 (source :
(source :