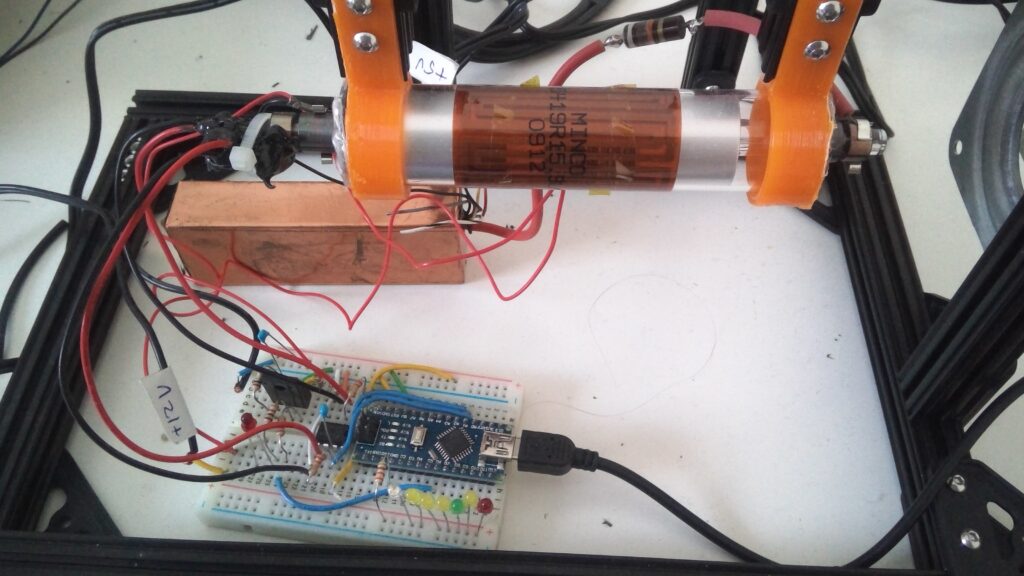
Avec le laser stabilisé en température et le polarimètre version 1, j’ai pu mesurer les états de polarisation suivants :
Mélange de deux polarisations (non polarisé)
Explication : la lame quart d’onde a soit aucun impact (zéro degré par rapport à la polarisaion), soit transforme une partie en polarisation circulaire. Puisque les deux polarisations orthogonales ont une intensité égale, la moitié passe le polariseur devant la photodiode et le signal reste constant.
Polarisation horizontale
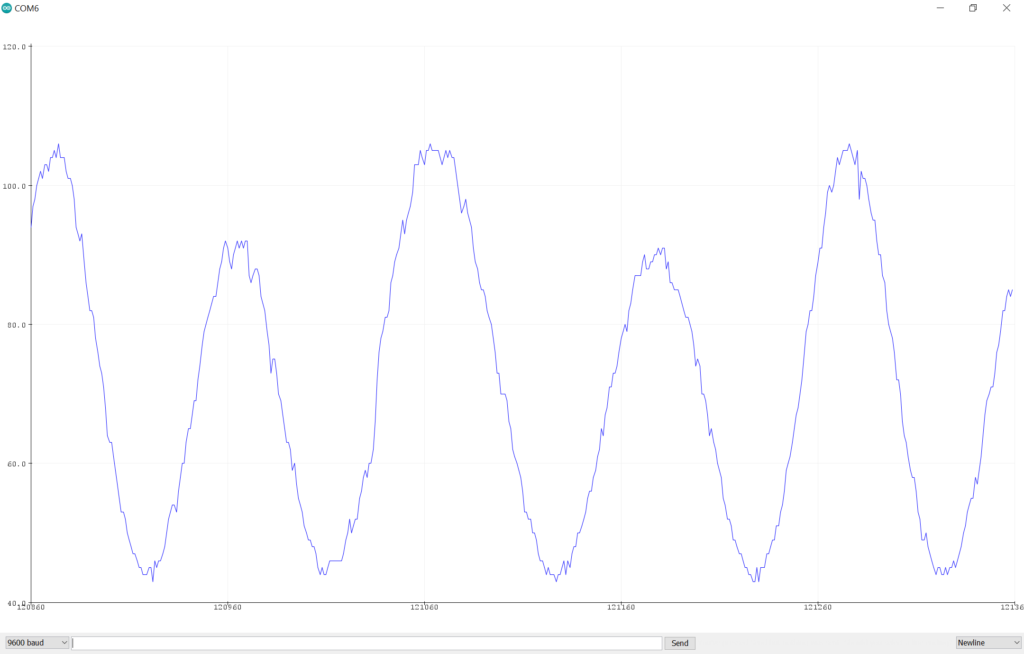
Explication : La lame quart soit n’a aucun impact (signal maximal, toute la polarisation passe le polariseur devant la photodiode), soit retire la moitié du signal lorsqu’elle est à 45 degrés (la polarisation est complètement transformée en circulaire, et le polariseur filtre la moitié du signal).
Polarisation verticale
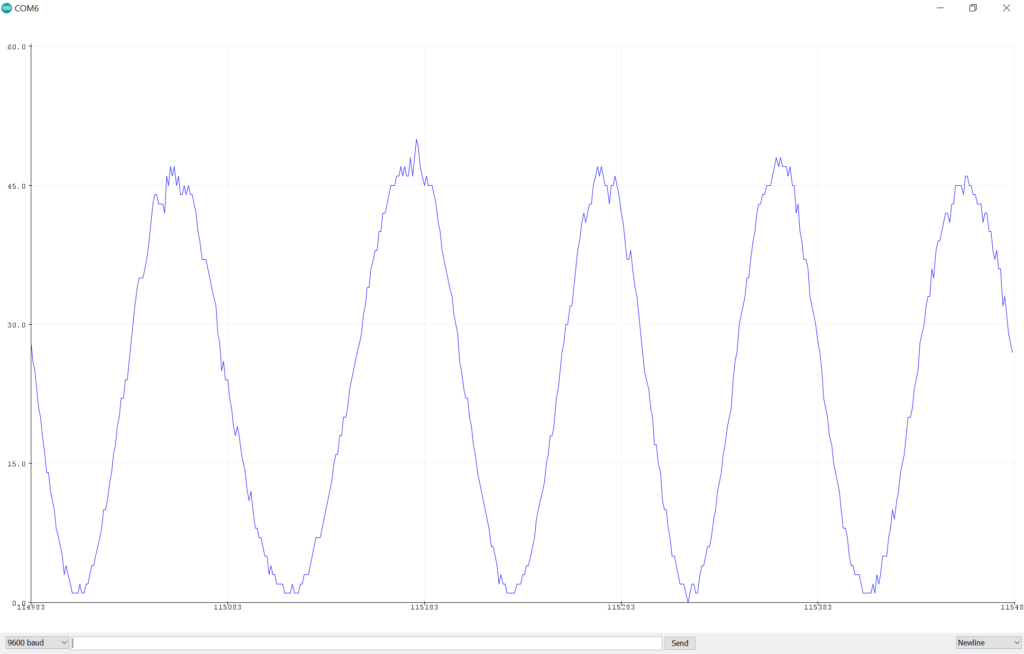
Explication : La lame quart d’onde soit n’a aucun impact, à zéro degré (le polariseur bloque complètement la polarisation à 90 degrés, signal à 0), soit elle convertit complètement le signal en polarisation circulaire lorsqu’elle est à 45 degrés (le polariseur en filtre la moiité et le signal est à 1/2 de la valeur d’intensité).
Transition entre les deux polarisation orthogonales
Polarisation circulaire
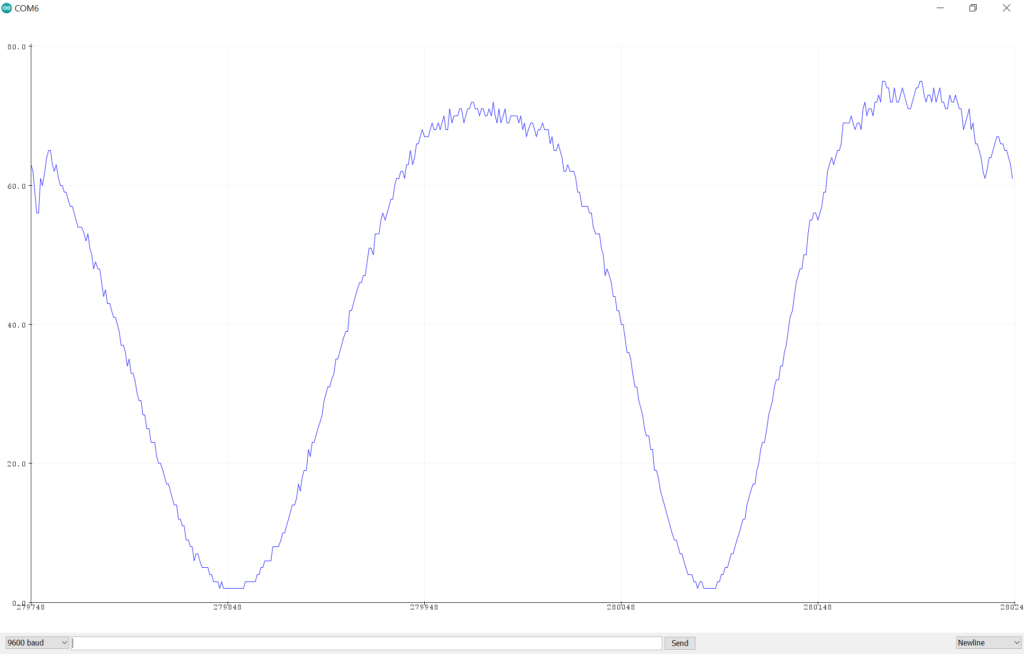
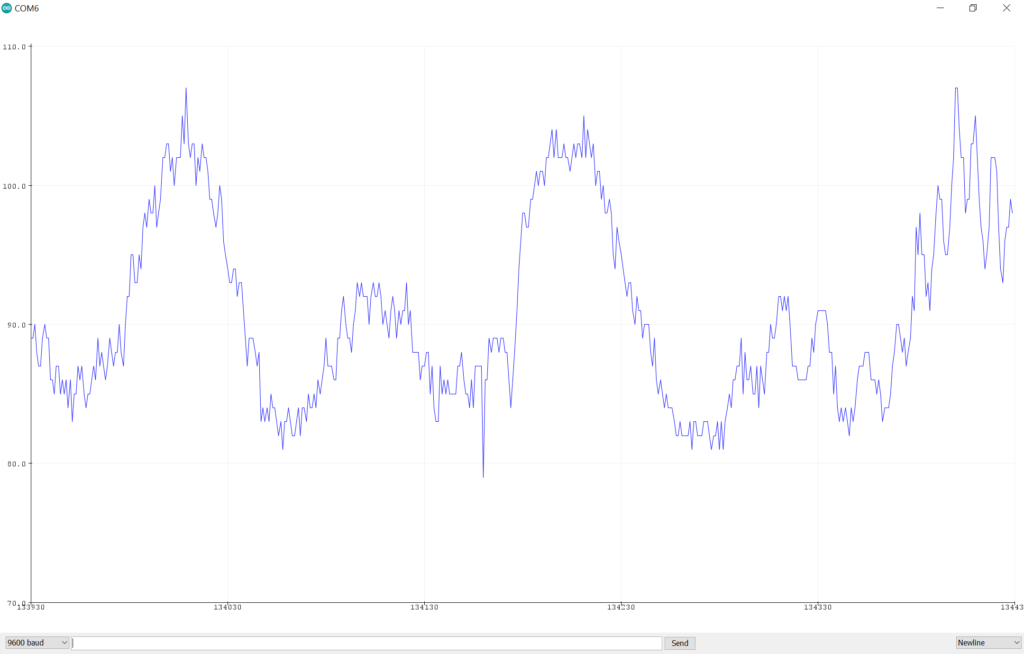
Explication : La polarisastion circulaire est convertie en polarisation linéaire par la lame quart d’onde, qui tourne ensuite l’axe de polarisaion linéaire. Cela prend donc une rotation de 90 degrés pour passer d’un maximum à un minimum, parce qu’elle passe à travers un autre polariseur linéaire. La période est deux fois plus grande parce que la lame quart d’onde doit tourner deux fois plus (90 degrés vs 45 degrés).
Mélange entre polarisation linéaire et circulaire

Développements futurs
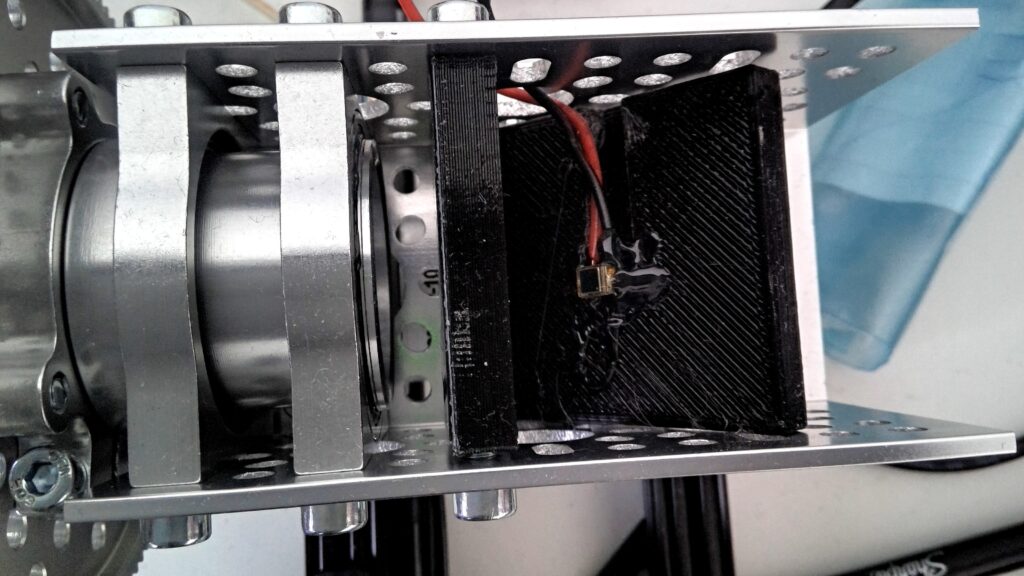
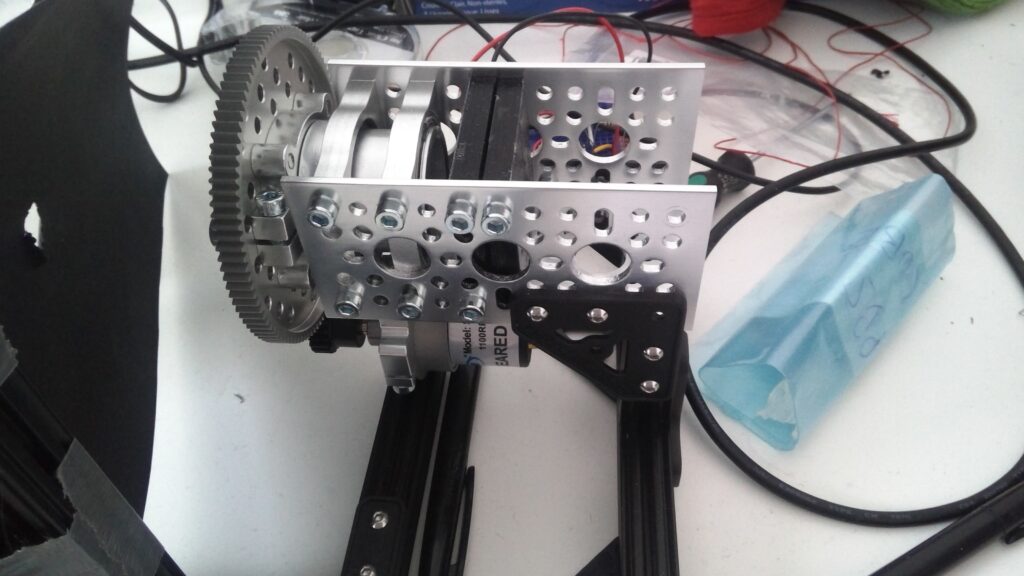
Le moteur utilisé est simplement un moteur DC sans encodeur et sans régulation de vitesse, ce qui crée des variations, et l’orientation absolue n’est pas accessible. Pour différencier entre la polarisation linéaire et la polarisation circulaire, on remarque que l’information en fréquence est importante. En faisant la transformée de Fourier, on pourrait retrouver le poids des composantes circulaires et linéaires.
Si on s’attend à n’avoir que de la polarisation linéaire, le système proposé par siliconsam dans son laser régulé en température fonctionne mieux, car on peut échantillonner simultanément les deux états, à l’aide d’un cube beamsplitter polarisant et de deux photodiodes, le tout sans pièces mécaniques et sans traitement de signal, ce qui rend le tout très simple.
La position angulaire absolue de la lame quart d’onde permettrait de différencier entre les deux polarisation circulaires (gauche et droite) qui sont décalés en phase de 90 degrés. En ce moment, en regardant seulement le signal sinusoidale sans tenir en compte de l’angle, c’est impossible de voir la différence, parce que le signal passe de zéro au maximum d’intensité dans les deux cas.
L’information en phase et en fréquence est donc aussi importante que l’intensité dans le temps. Le premier débroussaillage est fait, pour la suite, une meilleure optomécanique est nécessaire.